Czarodziej_snow
2018-06-30 15:53:36 UTC
Bardzo trudno jest zrozumieć coś czego nie możemy skojarzyć z otaczającą nas rzeczywistością. Iloczyn wektorowy jest takim właśnie abstrakcyjnym matematycznym tworem który nijak się ma do tego co obserwujemy w życiu codziennym. Sam spędziłem sporo czasu nad jego zrozumieniu i często te próby kończyły się zapętleniem i zawieszeniem procesów myślowych, dlatego też rozumiem że sporo osób może mieć spore trudności w zrozumieniu o czym ja piszę. Dlatego też narysowałem schematy które krok po kroku pokazują jak przejść z równań Eulera do wektora momentu siły rozpisane dla jednego punktu.
Na wstępie opiszmy czym jest iloczyn wektorowy
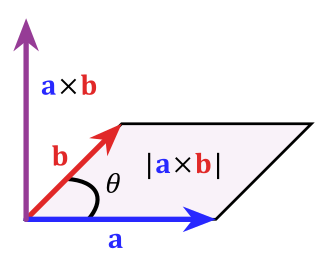
"Wynikiem takiego działania jest nowy wektor, którego długość (wartość) jest równa iloczynowi długości dwóch wektorów i sinusa kąta między nimi, kierunek otrzymanego wektora jest prostopadły do płaszczyzny wyznaczonej do przez dwa wektory, a zwrot nowego wektora określany regułą prawej ręki lub regułą śruby prawoskrętnej. Istotna jest tu kolejność mnożenia ponieważ AxB nie równa się BxA."
http://www.naukowiec.org/wzory/fizyka/iloczyn-wektorowy-dwoch-wektorow_869.html
zapis wektorowy
Ai x Bj = Ck
W zapisie skalarnym C jest wektorem prostopadłym do płaszczyzny jk, a jego długość iloczyn modułów wektorów które go tworzą razy sinus kąta między nimi.
C = IAI IBI sina
Jeżeli wektory A i B są do siebie prostopadłe to sin90=1 i ten człon zanika. W poniższym schemacie wszystkie wektory są tak rozłożone, by operacje iloczynu wektorowego były zawsze dla kąta 90 stopni. Poniżej opisany schemat graficzny.
Loading Image...
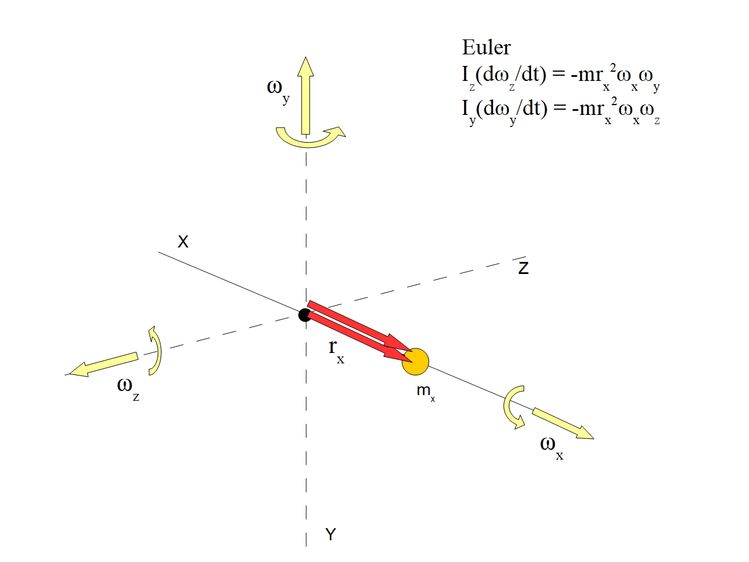
Używając równań Eulera tworzymy schemat wektorowy dla pojedynczego punktu. Pamiętając że Iz=mxrx2
Loading Image...
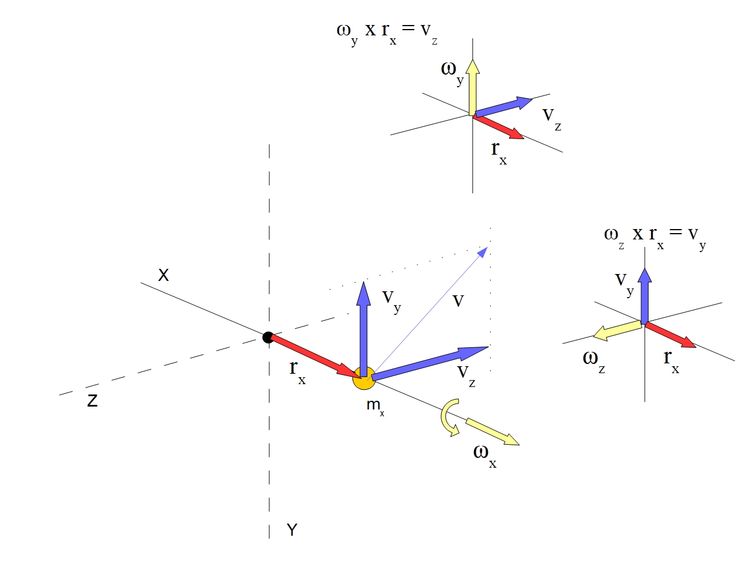
Bierzemy jeden z wektorów rx i składowe zy wektora prędkości kątowej ω, aby uzyskać wektor prędkości liniowej dla naszego punktu, zgodny ze wzorem na prędkość liniową
v = ω x r
Loading Image...
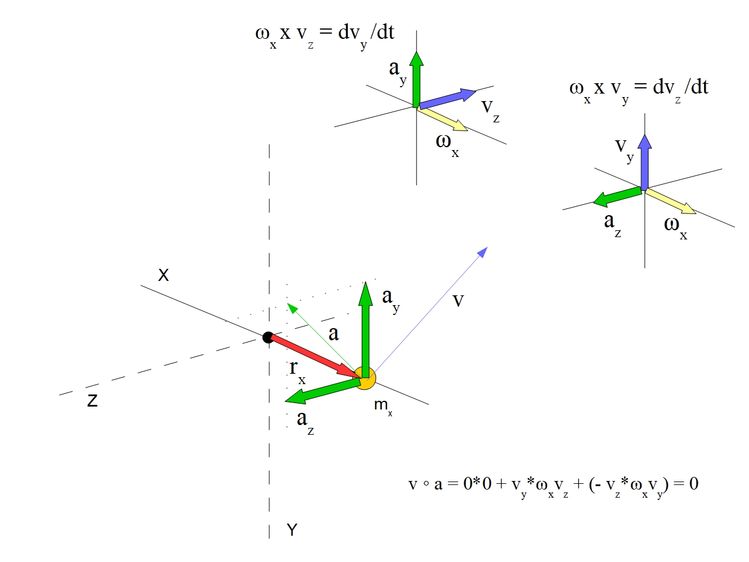
W ten sam sposób używamy uzyskany wektor prędkości i ostaną składową wektora prędkości kątowej, używając tym razem wzoru na przyspieszenie dośrodkowe.
a = ω x v
Zauważmy że iloczyn skalarny wektora przyspieszenia i prędkości liniowej jest równy zero, czyli wektory te są do siebie prostopadłe, co znaczy że mamy do czynienia z tak zwanym przyspieszeniem dośrodkowym co ciekawe nie jest on skierowany do środka ciężkości BS.
Loading Image...
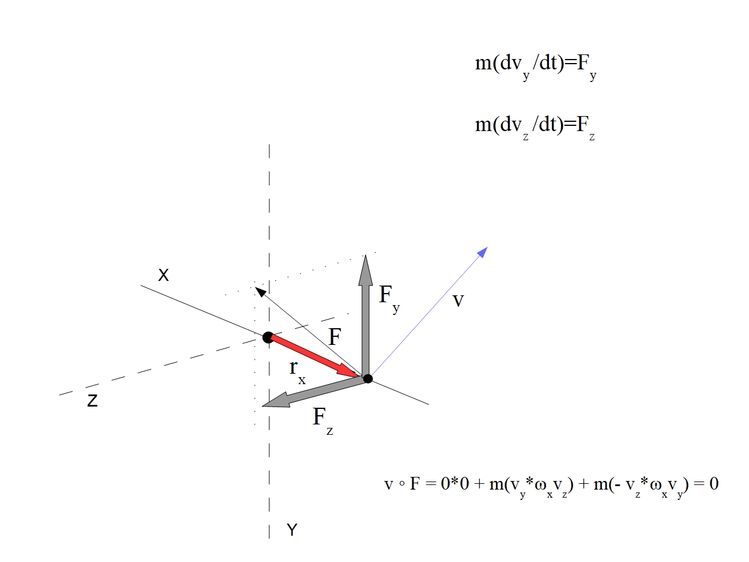
Skąd się wzięło to przyspieszenie? Kiedy wrócimy do poprzedniego schematu zauważymy że wektory prędkości liniowe vz i vy mają prędkość kątową ωx i ulegają one obrotowi zgodnie z tą prędkością. Pamiętajmy że wektor przyspieszenia liniowego jest definiowany jak różnica prędkości liniowej w czasie a=dv/dt. Skoro wektor prędkości liniowej się obraca zmienia swoją pozycje w czasie to zgodnie z drugą zasadą dynamiki ulega on przyspieszeniom. a przyspieszenia te są wprost proporcjonalne do użytej siły i odwrotnie proporcjonalne do masy. W ten sposób bierzemy wektor przyspieszenia mnożymy go przez masę punktu i uzyskujemy działającą siłę, zgodnie ze wzorem
F=am
Loading Image...
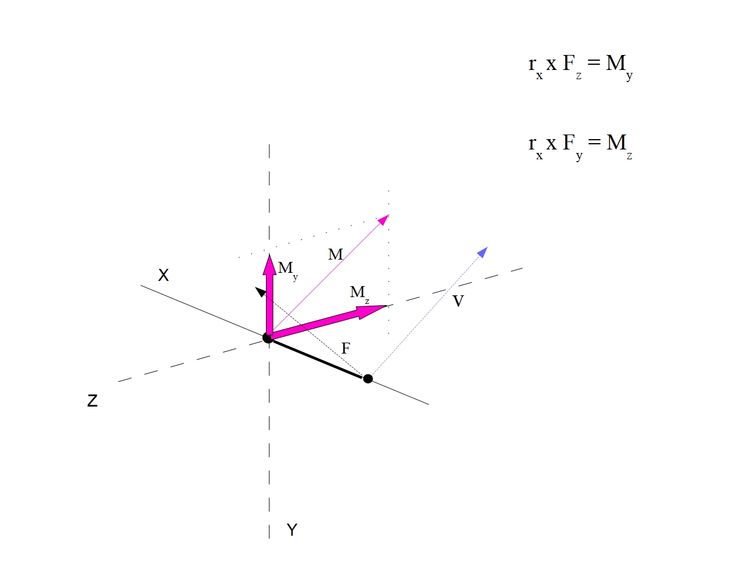
Teraz sytuacja jest już oczywista. Uzyskany wektor siły F i położenia r tworzą moment siły M zgodny ze wzorem
M = r x F
Loading Image...
To że przeciętny zjadacz chleba ma problem ze zrozumieniem tych zależności to w sumie nic dziwnego. Kto normalny by to zrozumiał:). Gorzej bo te podstawowe zależności oparte na fundamentalnych prawach Fizyki są zupełnie niezrozumiałe dla samych Fizyków, pokazuje to jak marny poziom prezentują i jak bardzo nie rozumieją wiedzy którą posiadają. Owszem umieją policzyć to i tamto ale ich poziom zrozumienia co właściwie liczą jest poza wszelką krytyką. Zwykły kalkulator który wykonuje algorytm bez żadnego zrozumienia co właściwie zrobił.
Na podstawie tej nowej wiedzy można by spróbować stworzyć innowacyjne urządzenia ale wymagało by to współpracy i rozwijania tej wiedzy, a ja niestety cały czas zderzam się ze ścianą ignorancji i arogancji. Choć bardzo by chcieli, nie umieją temu zaprzeczyć bo tak wygląda rzeczywistość, więc chowają głowę w piasek i liczą na to że nikt tego nie zauważy.
Na wstępie opiszmy czym jest iloczyn wektorowy
"Wynikiem takiego działania jest nowy wektor, którego długość (wartość) jest równa iloczynowi długości dwóch wektorów i sinusa kąta między nimi, kierunek otrzymanego wektora jest prostopadły do płaszczyzny wyznaczonej do przez dwa wektory, a zwrot nowego wektora określany regułą prawej ręki lub regułą śruby prawoskrętnej. Istotna jest tu kolejność mnożenia ponieważ AxB nie równa się BxA."
http://www.naukowiec.org/wzory/fizyka/iloczyn-wektorowy-dwoch-wektorow_869.html
zapis wektorowy
Ai x Bj = Ck
W zapisie skalarnym C jest wektorem prostopadłym do płaszczyzny jk, a jego długość iloczyn modułów wektorów które go tworzą razy sinus kąta między nimi.
C = IAI IBI sina
Jeżeli wektory A i B są do siebie prostopadłe to sin90=1 i ten człon zanika. W poniższym schemacie wszystkie wektory są tak rozłożone, by operacje iloczynu wektorowego były zawsze dla kąta 90 stopni. Poniżej opisany schemat graficzny.
Loading Image...
Używając równań Eulera tworzymy schemat wektorowy dla pojedynczego punktu. Pamiętając że Iz=mxrx2
Loading Image...
Bierzemy jeden z wektorów rx i składowe zy wektora prędkości kątowej ω, aby uzyskać wektor prędkości liniowej dla naszego punktu, zgodny ze wzorem na prędkość liniową
v = ω x r
Loading Image...
W ten sam sposób używamy uzyskany wektor prędkości i ostaną składową wektora prędkości kątowej, używając tym razem wzoru na przyspieszenie dośrodkowe.
a = ω x v
Zauważmy że iloczyn skalarny wektora przyspieszenia i prędkości liniowej jest równy zero, czyli wektory te są do siebie prostopadłe, co znaczy że mamy do czynienia z tak zwanym przyspieszeniem dośrodkowym co ciekawe nie jest on skierowany do środka ciężkości BS.
Loading Image...
Skąd się wzięło to przyspieszenie? Kiedy wrócimy do poprzedniego schematu zauważymy że wektory prędkości liniowe vz i vy mają prędkość kątową ωx i ulegają one obrotowi zgodnie z tą prędkością. Pamiętajmy że wektor przyspieszenia liniowego jest definiowany jak różnica prędkości liniowej w czasie a=dv/dt. Skoro wektor prędkości liniowej się obraca zmienia swoją pozycje w czasie to zgodnie z drugą zasadą dynamiki ulega on przyspieszeniom. a przyspieszenia te są wprost proporcjonalne do użytej siły i odwrotnie proporcjonalne do masy. W ten sposób bierzemy wektor przyspieszenia mnożymy go przez masę punktu i uzyskujemy działającą siłę, zgodnie ze wzorem
F=am
Loading Image...
Teraz sytuacja jest już oczywista. Uzyskany wektor siły F i położenia r tworzą moment siły M zgodny ze wzorem
M = r x F
Loading Image...
To że przeciętny zjadacz chleba ma problem ze zrozumieniem tych zależności to w sumie nic dziwnego. Kto normalny by to zrozumiał:). Gorzej bo te podstawowe zależności oparte na fundamentalnych prawach Fizyki są zupełnie niezrozumiałe dla samych Fizyków, pokazuje to jak marny poziom prezentują i jak bardzo nie rozumieją wiedzy którą posiadają. Owszem umieją policzyć to i tamto ale ich poziom zrozumienia co właściwie liczą jest poza wszelką krytyką. Zwykły kalkulator który wykonuje algorytm bez żadnego zrozumienia co właściwie zrobił.
Na podstawie tej nowej wiedzy można by spróbować stworzyć innowacyjne urządzenia ale wymagało by to współpracy i rozwijania tej wiedzy, a ja niestety cały czas zderzam się ze ścianą ignorancji i arogancji. Choć bardzo by chcieli, nie umieją temu zaprzeczyć bo tak wygląda rzeczywistość, więc chowają głowę w piasek i liczą na to że nikt tego nie zauważy.